BACKGROUND
Due to model uncertainty and disturbances, we cannot predict the exact behaviour of autonomous systems. For example, the motion of an autonomous cars is influenced by the current road conditions which lead to varying friction forces and thus to different velocities and turning radii for the same input signals.
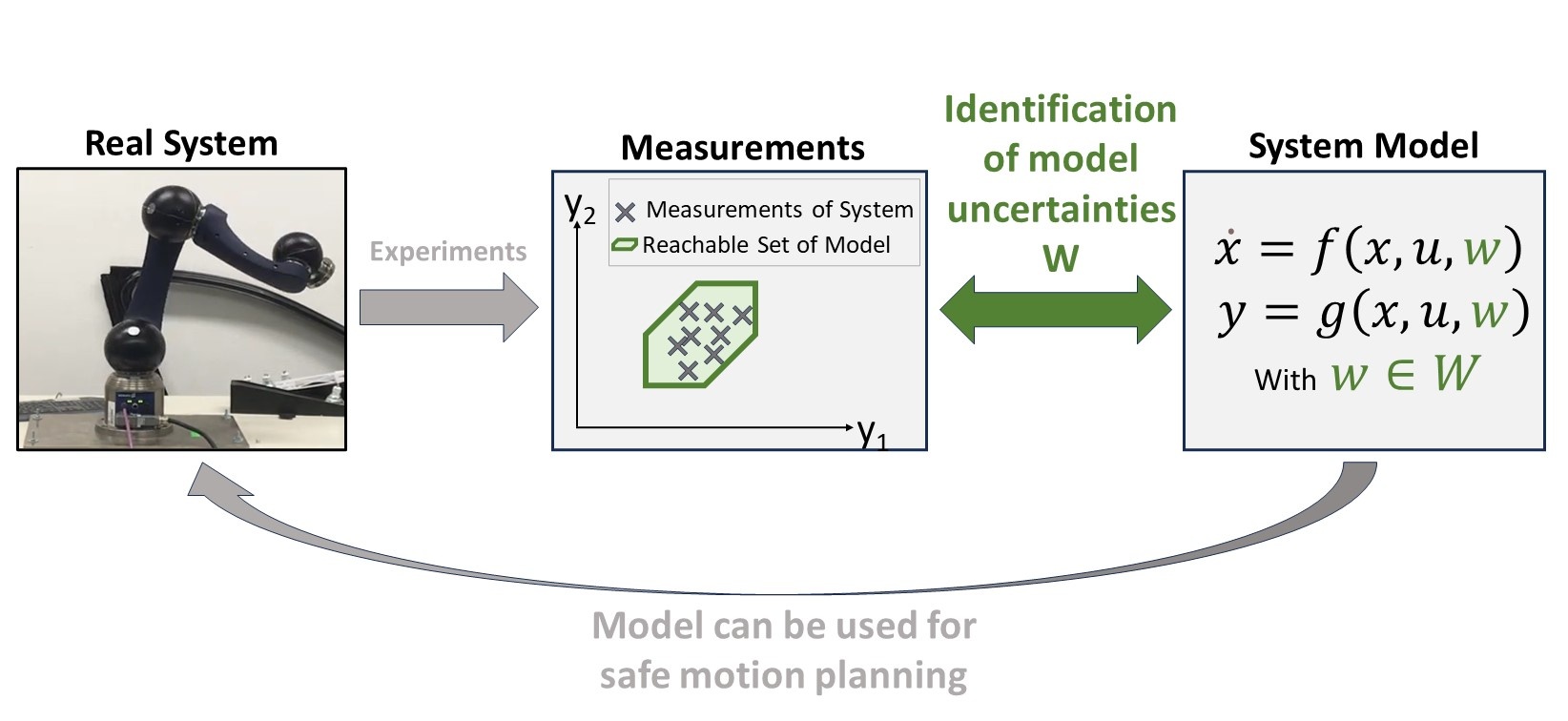
When we know the bounds of the uncertainties, we can compute the set of states which the system can reach. For instance, by estimating the maximum friction force and the bounds of other uncertainties, we are able to determine the spectrum of possible velocities and turning radii and thus, we can compute the set of positions where the vehicle could be after a certain amount of time. If we know that all these reachable states are safe, e.g., the reachable positions are not occupied by obstacles and all state constraints such as speed limit are satisfied, then safety has been formally verified. This process of employing mathematical techniques on a system model subject to uncertainties to estimate the reachable sets is called reachability analysis and widely used for safety verification.
To be able to transfer the verification results from the model back to the real system, the model uncertainties must conform to the true uncertainties. However, we usually cannot derive the exact uncertainty bounds from a physical analysis of the system.
Going back to our example of the autonomous car: Even when we know the exact road conditions,
calculating the friction force is highly complex, involving numerous vehicle parameters that are challenging to measure directly.
It is therefore of interest to overapproximate the uncertainties from data whereas the resulting reachable set of the model must contain all measurements. This identification approach is called reachset-conformant identification [1].
PROJECT DETAILS
This research project concentrates on estimating uncertainty sets from data. First, you will familiarize yourself with set-based computations, reachability analysis and parameter estimation methods. Understanding the concept of reachset-conformant identification, you will implement your own approach in the Matlab toolbox CORA [2] by adapting a set-based parameter estimation method from the literature. Finally, you analyze the performance of your approach on an autonomous system and compare it with existing reachset-conformant identification methods.
TASKS
• Literature research on methods for set-based parameter estimation
• Implementation of a method to identify reachset-conformant models
• Analysis and evaluation of the method on an autonomous system (e.g., robot, autonomous vehicle)
• Comparison with other reachset-conformant identification methods
REFERENCES
[1] Stefan B. Liu, Bastian Schürmann, and Matthias Althoff. Guarantees for real robotic sy-
stems: Unifying formal controller synthesis and reachset-conformant identification. IEEE
Transactions on Robotics, pages 1–15, 2023.
[2] Matthias Althoff. An introduction to CORA 2015. In ARCH@ CPSWeek, pages 120–151,
2015.